by Wayne Williams
[This guest post from Bionics for Everyone takes a deeper dive into one of the subjects featured in Amplitude‘s current issue: the future of prosthetic technology. Read the original article at https://bionicsforeveryone.com/bionic-leg-foot-control-systems/.]
With bionic arms and hands, the goal of existing control systems has been to connect the user’s brain to the bionic limb. But when it comes to bionic legs and feet, control has been delegated to local microprocessors that automatically adjust the prosthesis based on sensor readings. These sensor readings typically monitor the position or angle of the bionic joint; the individual’s walking speed; the limb’s force of impact on the ground; and the slope or nature of the terrain (e.g., stairs, rocky surfaces). In addition, microprocessors make automatic adjustments based on joint resistance, joint angle (for joints that offer powered propulsion), and the amount and timing of power inputs.
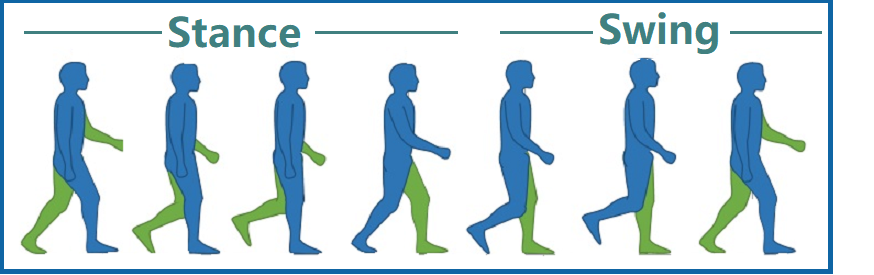
The main goal of these automatic systems is to ensure that bionic joints fulfill their proper role in the human gait cycle. However, the systems are mostly reactionary—i.e., they react only after the residual limb has moved. The prosthesis gets pulled along via a socket or an osseointegrated connector, and only then does the microprocessor make adjustments. This adjustments can occur during both the Stance phase and the Swing phase of the gait cycle.
Microprocessors can be extremely effective, as amply documented in these videos showing above-knee amputees running up and down stairs, jogging across rugged terrain, and navigating a broad range of obstacles. It’s difficult to argue with this kind of effectiveness. Local microprocessor control works.
So what’s missing, and what might be coming next? Proactive user control and sensory feedback.
Proactive User Control
To move a natural limb, the brain sends signals to motor nerves, which then cause related muscles to contract. This process occurs even with amputated limbs, although it may first need to be enhanced through an Ewing amputation or targeted muscle reinnervation.
Muscle movement generates an electrical signal that can be detected by myoelectric sensors either embedded in the muscles or placed against the skin above the muscles. From there, the signals can be translated into commands for a bionic device. This type of sensor/control system is the basis for most commercial bionic hands, although it has had its share of problems.
Össur is now exploring a similar technique for controlling bionic legs. What are the advantages of this type of system? In theory, it can convey user intent the moment the user’s muscles begin to move—instead of being pulled along reactively by a residual limb, the prosthesis would move proactively along with the residual limb.
Without power augmentation, it is difficult to see the advantage of this arrangement. Features like flexion resistance and stumble recovery are inherently reactionary anyway, and without advanced sensory feedback and a very fast, trustworthy control system, it is not likely that a human could match the speed or effectiveness of automatic adjustments. But add propulsive power into the mix, and it’s a different story. The strength and timing of myoelectric signals could be used to control power levels more effectively, and improve the transition from the Stance Phase to the Swing Phase (push-off) in the gait cycle.
So are we looking at some kind of hybrid system, where the user controls push-off and power augmentation but the microprocessor controls all other adjustments? We don’t know yet, because all the systems we’ve looked at are still in development. Also, the incorporation of advanced sensory feedback may further blur the line between user control versus microprocessor control.
Advanced Sensory Feedback
Without sensory feedback, users must visually guide their prosthetic feet on any terrain that is not flat and predictable. This can be a slow and tiring process.
The solution to this challenge is the same one being explored for upper limbs—a neural interface that directly connects the brain to the prosthesis. When provided with this kind of feedback, the brain can take on more sophisticated responsibilities, especially if paired with an accurate and responsive control system.
For example, consider how humans naturally respond to a slippery surface like ice: We shorten our steps but keep our feet squarely under us, even shuffling to avoid slipping. On uneven terrain, we widen our stance to optimize balance. These types of intuitive responses are impossible for a bionic control system to achieve unless it incorporates advanced sensory feedback.
This doesn’t affect just control, either. Restoring sensory feedback can improve user confidence in their bionic limb, make it less tiring to use, and help reduce phantom pain. The technology we’re describing is not yet available commercially, but if you want to read more about it, visit Sensars.com or Rippleneuro.com.
For Bionics for Everyone’s comprehensive descriptions of all current lower-limb technologies, devices, and research, see Bionics for Everyone’s complete guide.