Last week we introduced you to the SuperHand, an upper-limb prosthesis developed in Poland that users control with their feet. A day or two later we heard from Peter Kyberd, an engineering professor at the University of Portsmouth and pioneering developer of prosthetic hands. He’s also the author of a recent book about the history of prosthetic arms titled Making Hands.
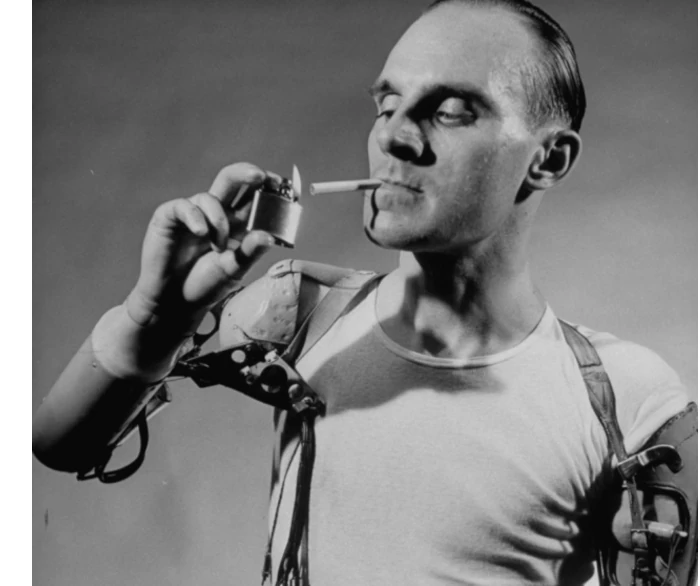
Kyberd called our attention to a foot-powered prosthetic arm that IBM developed shortly after World War II. It was developed by an engineer named Samuel Alderson, based on concepts that had been floating around since the late 1910s. “It should enable a man who has lost one, or both, arms to carry on by himself in the daily routine of dressing, eating, handling objects of reasonable size and shape,” Alderson told the New York Times in 1946. “The fingers of the present model are strong enough to permit the wearer to lift up to forty pounds dead weight—say, a piece of luggage filled with contents.”
Alderson’s device incorporated Cold War technology that was originally used in early missile-guidance systems. The original version of his prosthesis was actuated by shoulder movements, but it wasn’t effective for amputees with very short residual limbs. So in the 1950s he created a modified foot-activated model, which Life magazine described in its August 7, 1950 edition: “Unlike other artificial arms, which can be moved only by cables hooked to other parts of the body and which require strenuous effort for every movement, the new arm requires no muscle power. All its power is provided by a battery-driven electric motor mounted in the arm. This is controlled by switches which the amputee operates with his foot.”
In a passage that still rings true almost 75 years later, Life added that the futuristic limb was unavailable to most amputees. “So far only three arms have been built,” it noted. “Most amputees must wait at least two years before they can hope to get an electric limb.”
Some things never change.